Methods
 | Magnetic: Many rocks and minerals are weakly magnetic or are magnetized by induction in the Earth's field, and cause spatial perturbations or "anomalies" in the Earth's main field. Man-made objects containing iron or steel are often highly magnetized and locally can cause large anomalies up to several thousands of nanoTeslas (nT). |
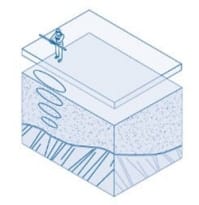 | Electromagnetic (EM): An EM signal is generated by a transmitter coil. This produces a secondary EM signal in a conductor that can be detected on surface by a receiver coil. The quadrature component provides a measure of the apparent ground conductivity whilst the real (in-phase) component is responsive to buried metallic objects. The spacing between the coils determines the maximum depth of investigation in any given setting. |
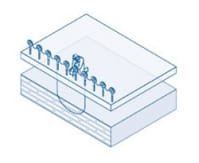 | Electrical resistivity imaging (ERI): ERI uses an array of electrodes connected by multicore cable to provide a linear depth profile, or pseudosection, of the variation in resistivity both along the survey line and with depth. Standard practice is to apply an electrical direct current (DC) between two electrodes implanted in the ground and to measure the difference of potential between two additional electrodes that do not carry current. The types of electrode arrays that are most commonly used include Wenner, Schlumberger and dipole-dipole. |
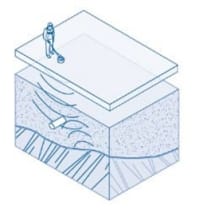 | Ground penetrating radar (GPR): GPR uses a high-frequency (25 to 4,000 MHz) EM pulse transmitted from a radar antenna to probe the ground. The transmitted radar pulses are reflected from various interfaces within the ground, and this return is detected by the radar receiver. Reflecting interfaces may be soil horizons, the groundwater surface, cracks in concrete, man-made objects, or any other interface possessing a contrast in dielectric properties. |
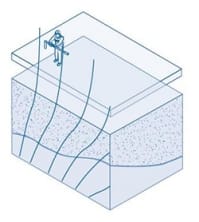
 | Seismic refraction: The seismic refraction method is based on the measurement of the travel time of seismic body waves refracted at the interfaces between subsurface layers of different velocity. Seismic energy is provided by a source ('shot') located on the surface. Energy radiates out from the shot point, either travelling directly through the upper layer (direct arrivals), or travelling down to and then laterally along higher velocity layers (refracted arrivals) before returning to the surface. This energy is detected on surface using a linear array of geophones. Observation of the travel-times of the refracted signals provides information on the depth profile of the refractor. |
 | Surface wave seismics: A wide variety of seismic waves propagate along the surface of the earth. They are called surface waves because their amplitude decreases exponentially with increasing depth. The Rayleigh wave is important in engineering studies because of the close relationship of its velocity to the shear-wave velocity for earth materials. As most earth materials have Poisson's ratios in the range of 0.25 to 0.48, the approximation of Rayleigh wave velocities as shear-wave velocities causes less than a 10% error. |
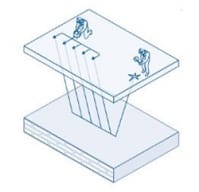
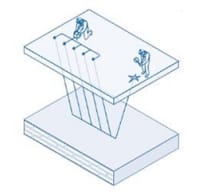
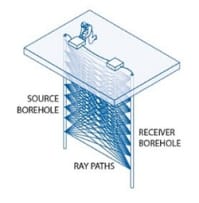 | Borehole seismics: This category of geophysical method includes crosshole, downhole and vertical seismic profiling. Compressional (P-) and/or shear (S-) wave velocities of materials are determined at depths of engineering and environmental concern where the data can be used in problems related to soil mechanics, rock mechanics, foundation studies, and earthquake engineering.,All of the dynamic elastic moduli of a material can be determined from knowledge of the in situ density, P-, and S-wave velocity.,Acquiring detailed seismic data yields the required information to analytically assess a site.,Low-strain material damping and inelastic attenuation values can also be obtained from crosshole and downhole surveys. VSP surveys measure the effects of reflection, transmission, multiples, and attenuation as a function of depth rather than disregarding information following the first breaks which is characteristic of downhole surveys. |
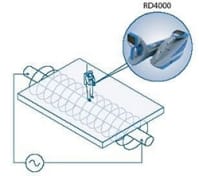 | Radio frequency location (RFL): RFL systems can be used in either passive or active modes to track known or unknown services. Buried services that do not interact with surface features (e.g. access covers or lampposts) are traced by scanning passively for their emitted signals. Background radio noise may mask any signals from such services. In passive mode (Radio and Power), the RFL detects mains and low frequency radio signals re-radiated by conductive pipes and cables. In this mode, a buried pipe or service can be accurately positioned but its depth cannot be determined. In active mode, a signal generator (operating between LF and ULF frequency bands) is used to introduce a signal onto a target pipe or cable, either by a direct connection or by inductive coupling. Active mode can be used to determine both the position and approximate depth of the target. A pipe sonde may also used in conjunction with the RFL to trace accessible non-metallic services (primarily drains) away from access chambers. |